Robots for pick and place
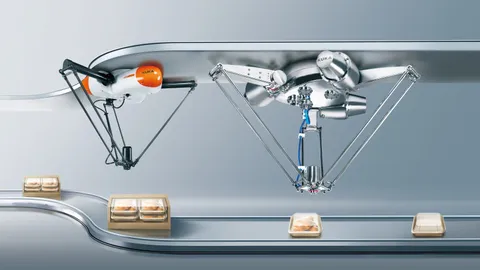
A pick-and-place robot transfers parts between conveyors, trays, and fixtures, usually at high rate. Cycle speed is the binding constraint, which is why delta robots dominate fast, light picking, while SCARA and cobots cover heavier or more flexible transfers. Vision integration is common so the robot can locate parts arriving in random orientation.
145 matching models in our database, payload up to 320 kg.
What matters when you spec a pick and place robot
- ●Cycle speed: the binding constraint; low moving mass and high acceleration win.
- ●Payload: usually light, which is what enables the high pick rates.
- ●Work envelope: must cover the infeed and outfeed positions.
- ●Vision: needed when parts arrive unsorted or in random orientation.
Pick and Place robots in our database
Universal Robots
UR10e
Universal Robots
UR5e
Universal Robots
UR12e
Universal Robots
UR16e
Universal Robots
UR3e
Universal Robots
UR7e

Yaskawa Motoman
Motoman HC10
FANUC
CRX-10iA
FANUC
CRX-10iA/L
FANUC
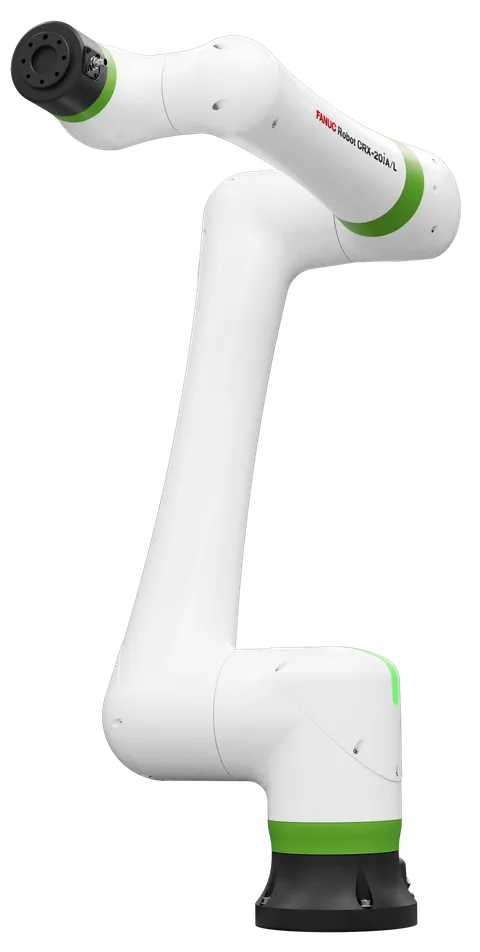
CRX-20iA/L

KUKA
LBR iiwa 14 R820

KUKA
LBR iisy 11 R1300
KUKA
LBR iisy 15 R930
KUKA
LBR iisy 3 R760

Yaskawa Motoman
Motoman GP8

Yaskawa Motoman
MotoMINI
Yaskawa Motoman
PL80

ABB Robotics
YuMi IRB 14000 (dual-arm)

KUKA
KR 10 R900 sixx
KUKA
KR 6 R700 sixx

Yaskawa Motoman
GP12

Yaskawa Motoman
GP25

Yaskawa Motoman
GP50

Yaskawa Motoman
GP7

Yaskawa Motoman
PL190
Yaskawa Motoman
PL320

ABB Robotics
GoFa CRB 15000-10/1.52
ABB Robotics
GoFa CRB 15000 (5 kg)

FANUC
LR Mate 200iD/7L

FANUC
M-3iA/6S
KUKA
KR 10 R1100-2 (AGILUS)
KUKA
KR 20 R1810
KUKA
KR 3 AGILUS

ABB Robotics
IRB 360 FlexPicker 8/1130

AUBO
i5

FANUC
M-10iD/12

FANUC
SR-6iA (SCARA)
Kawasaki Robotics
RS007N
KUKA
KR DELTA

KUKA
KR SCARA R600

ABB Robotics
IRB 1100
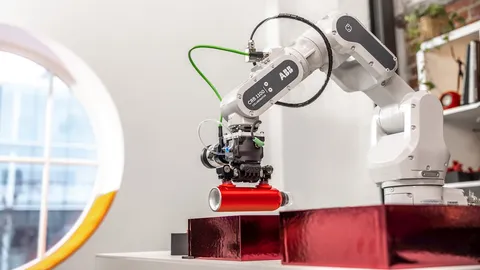
ABB Robotics
SWIFTI CRB 1100-4/0.58

ABB Robotics
YuMi IRB 14050 (single-arm)

Kawasaki Robotics
RS007L

Yaskawa Motoman
MH12

ABB Robotics
IRB 1300-11/0.9
Dobot
CR10A
Dobot
CR3A
Dobot
CR5A
Dobot
CR7A
Mitsubishi Electric
MELFA ASSISTA RV-5AS-D
Techman Robot
TM14
Techman Robot
TM16
Techman Robot
TM20

Techman Robot
TM25S
Techman Robot
TM5-700
Techman Robot
TM5-900

Techman Robot
TM7
Techman Robot
TM7S

ABB Robotics
IRB 1200-7/0.7

ABB Robotics
IRB 910SC-3/0.45 (SCARA)

ABB Robotics
IRB 920-6/0.55 (SCARA)

AUBO
i16

AUBO
i10

Dobot
Nova 2
Dobot
Nova 5

Doosan Robotics
M0609

Doosan Robotics
M0617

Doosan Robotics
M1013

Doosan Robotics
M1509
Epson Robots
VT6L

JAKA
Zu 20

JAKA
Zu 3

Mitsubishi Electric
MELFA RH-12FRH
Mitsubishi Electric
MELFA RH-20FRH
Mitsubishi Electric
MELFA RH-3FRH
Mitsubishi Electric
MELFA RH-6FRH
Techman Robot
TM12

ABB Robotics
IRB 1010

ABB Robotics
IRB 390 FlexPacker
AUBO
i3

Epson Robots
LS10-B

Epson Robots
LS20-B

Epson Robots
T3

Epson Robots
T6

JAKA
MiniCobo

JAKA
Pro 5
AUBO
iS7
AUBO
iS3

Epson Robots
G10

Epson Robots
G20

Epson Robots
G3

Epson Robots
G6

Epson Robots
Flexion N6

Han's Robot
Elfin E05-Pro

JAKA
Pro 12

JAKA
Pro 16

Stäubli Robotics
TX2-40

Stäubli Robotics
TX2-90

Epson Robots
C12XL

Epson Robots
C4

Epson Robots
C8

Epson Robots
LS3-B

Epson Robots
Flexion N2

Han's Robot
Elfin E03

Han's Robot
Elfin E05
Han's Robot
Elfin E05-L

Han's Robot
Elfin E10

JAKA
S 5

Mitsubishi Electric
MELFA RV-7FRL

OMRON Robotics
i4-850
OMRON Robotics
i4-650

Stäubli Robotics
TS2-60

Stäubli Robotics
TX2touch-90

Epson Robots
LS6-B
JAKA
Zu 12

JAKA
Zu 18
JAKA
Zu 30

JAKA
Zu 5

JAKA
Zu 7
Stäubli Robotics
TP80

Stäubli Robotics
TS2-40

Stäubli Robotics
TX2-160

Stäubli Robotics
TX2-60

ROKAE
xMate SR3
ROKAE
xMate SR5

Stäubli Robotics
TS2-100

Stäubli Robotics
TS2-80

ROKAE
XB7

ROKAE
XB7L
ROKAE
xMate ER3

OMRON Robotics
eCobra 600
OMRON Robotics
eCobra 800

ROKAE
XB4

Inovance
IR-R4-56S5

Inovance
IR-S20-100Z42S5
Inovance
IR-S4-40Z15S3

Inovance
IR-S20-80Z42S5
Siasun
GCR3
Siasun
GCR7

Inovance
IR-R7H-72
Inovance
IR-S7-50

Siasun
SA10A
Siasun
SA4A

Siasun
SA7A
Buyer guides for pick and place
Frequently asked questions
- What makes a robot fast at pick and place?
- Low moving mass and high acceleration. Delta robots dominate high-rate light picking; SCARA and cobots cover heavier or more flexible transfers at lower rates.
- Do pick-and-place robots need vision?
- They do when parts arrive unsorted or in random orientation. A vision system locates each part so the robot can pick it without a fixture.